P2限位步进减速机
撬棒呆扳手的外形结构:撬棒呆扳手其内孔是由2个正六边形相互同心错3°而成。很多撬棒呆扳手都有弯头,常见的弯头角度在1°~45°之间,从侧面看旋转螺栓部分和手柄部分是错的。撬棒呆扳手的作用:撬棒呆扳手方便于拆卸装配在凹陷空间的螺栓、螺母,并可以为手指操作间隙,以防止擦伤。用在补充拧紧和类似操作中,可以使用撬棒呆扳手对螺栓或螺母施加大扭矩。撬棒呆扳手有各种大小,使用时要选择与螺栓或螺母大小对应的扳手。
现场中的精密行星减速机串轴故障均从输入轴的串动而表现出来。造成串轴的原因主要有两个方面:
1、是中间轴上的从动齿轮与轴紧固不牢所致。在实际传动中,往往由于从动齿轮与中间轴之间的过盈量不够,从动齿轮相对中间轴产生轴向串动,进而使输入轴发生轴向串动。因此,过盈量不够是造成串轴的主要原因。另外,精密行星减速机的转向对串轴也有一定的影响。
2、是由于断齿使输入轴失去轴向约束而发生串轴。
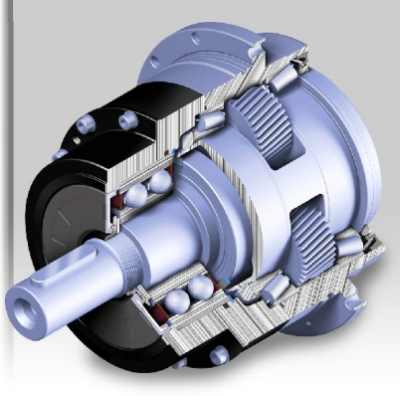
行星减速步进电机的主要结构及特点: 行星减速机主要传动结构为:行星轮,太阳轮,外齿圈.行星减速机因为结构原因,单级减速为3,一般不超过10,常见减速比为:3.4.5.6.8.10,减速机级数一般不超过3,但有部分大减速比减速机有4级减速。 相对其他减速机,行星减速机具有高刚性,高精度(单级可到1分以内),高传动效率(单级在97%-98%),高的扭矩/体积比,终身免维护等特点。 因为这些特点,行星减速机多数是在步进电机和伺服电机上,用来降低转速,提升扭矩,匹配惯量。 减速步进电机额定输入转速可达到18000rpm(与减速机本身大小有关,减速机越大,额定输入转速越小)以上,工业级行星减速机输出扭矩一般不超过2000Nm,特制超大扭矩行星减速机可到10000Nm以上。工作温度一般在-25℃到100℃左右,通过改变润滑脂可改变其工作温度。 行星减速器内部齿轮采用20CrMnTi渗碳淬火和磨齿具有体积小、重量轻,承载能力高,使用寿命长、运转平稳,噪声低、输出扭矩大,速比大、效率高、性能安全的特点。兼具功率分流、多齿啮合独用的特性。是一种具有广泛通用性的新型减速机。输入功率可达104kW。
近年来,伺服电机控制技术正朝着交流化、数字化、智能化三个方向发展。作为数控机床的执行机构,伺服系统将电力电子器件、控制、驱动及保护等集为一体,并随着数字脉宽调制技术、特种电机材料技术、微电子技术及现代控制技术的进步,经历了从步进到直流,进而到交流的发展历程。
伺服电机控制技术的发展推动技术的高速高精化。80年代以来,数控系统逐渐应用伺服电机作为驱动器件。交流伺服电机内是无刷结构,几乎不需维修,体积相对较小,有利于转速和功率的提高。华夏模具网指出,目前交流伺服系统已在很大范围内取代了直流伺服系统。在当代数控系统中,交流伺服取代直流伺服、软件控代硬件控制成为了伺服技术的发展趋势。由此产生了应用在数控机床的伺服进给和主轴装置上的交流数字驱动系统。
+
0-100-T1
|